
This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.

Outlook R&D – Grant project PIA
MetisMotion’s core competence lies in making solid-state actuators and their special properties usable for a wide range of applications. More efficient and smarter systems come to life. This is how we are constantly revolutionising drive technology.
In order to follow this premise, we are continuously researching to further optimise our drive solutions in the areas of technology, innovation and cost.
The next logical step for us is therefore to use polymer actuators as a further building block in our unique naXture technology family.
However, existing approaches from around the world make it clear that this solid-state actuator category is also very quickly reaching its limits. We will change that.
Funded by the Bavarian Technology Promotion Programme plus (BayTP+), the “PIA” project aims to make polymer actuators usable for greater force and displacement requirements, thus making them a valid technical option.
What does that mean in concrete terms?
The PIA project, “Polymer Integration Actuator”, aims to make novel polymer actuators useful for a wide range of applications.
EAP (electroactive polymers) promise low-cost, energy-efficient, recyclable actuation without the use of e.g. rare earths (electric motors). Unfortunately, EAPs alone, in their current form, offer only low energy density, which limits their widespread use.
EAPs are modified in the PIA project in such a way that they can provide a power of more than 10 W. The resulting actuator is to be coupled with a microfluidic integrator in order to offer a compact, weight-optimised actuator for a wide range of applications with high force and displacement requirements.
The combination of previously hardly usable EAP and the MetisMotion core competence microfluidic integrators therefore enables completely new actuator properties:
- High force density and good miniaturisability based on standard EAP actuator unit
- High efficiency
- Fully recycable
- Independence from rare earths or RoHS relevant pollutants
This is how we extend already existing properties of our naXture technology:
- High Stiffness
- Variable Impedance
- and many more
State of the art
Currently, electromagnetic drives are predominantly used for microdrives. These consist of a motor and a miniature gearbox to increase the torques or forces or reduce the speed. These have the advantage of lower costs due to the high quantities produced. However, one disadvantage of these drives is that the force density is low. In addition, the robustness is very limited, especially when mechanical impulses act on the drive from the outside. Furthermore, the efficiency of electromagnetic drives is very low due to the high Joule effect (current heat law) in the power class considered (<30W).
Pneumatic drives are also state of the art. These have cost advantages and can in principle be scaled well. However, they require a supply by means of hoses and pipes, compressed air generation via a pump and control by means of valves, which results in high installation space requirements. In addition, the stiffness is low and compared with other actuator concepts, the resulting forces are significantly smaller.
In addition, the controllability of pneumatic actuators is a major challenge. Pneumatic actuator systems also only have an average electro-mechanical efficiency of 10-15% and are therefore in many cases no longer usable in the long term when sustainability aspects are taken into account.
In addition, pneumatic drives cause high maintenance costs, as well as environmental pollution from oil dust, as oil is often added to the air during compression.
Pneumatic drives are therefore increasingly being replaced by electric drives in many applications. Examples of this are the aviation and automotive industries, as well as automation technology – especially gripping technology.

The objective of the MetisMotion development
EAPs are hardly usable today. For example, they only provide forces in the range of a few single-digit Newtons, require high voltages in the control and do not have the necessary robustness over their service life when directly integrated into the application environment.
In addition, they are not very flexible in their range of motion due to the specific design in the application.
Increases in force or travel normally translate proportionally into actuator volume and mass (i.e. twice the travel = twice the actuator size).
The PIA project aims to resolve this trade-off and make EAP available for a broad group of applications, following the core idea behind our unique naXture technology.
Technical key requirements:
| Electromechanical efficiency | 60 % |
| Force | > 300 N |
| Velocity | > 20 mm/s |
| Force density | > 1 kN/kg |
| Response time | < 5 ms |
| Stroke | > 20 mm |
New fields of application through PIA actuators
Two features of the PIA actuators illustrate the importance of this project, e.g. for the field of collaborative robotics and autonomous systems:
1) The energy efficiency for non-linear force/displacement requirements:
While electromagnetic drives have high efficiency for linear force/displacement relationships, this is massively reduced as soon as non-linear characteristics are required. However, this contradicts the nature of a large number of applications (e.g. gripping objects).
Currently, this causes, on the one hand, an oversizing of drives (they become large and heavy) and, on the other hand, a massive problem in terms of thermal management of systems. Cooling devices become necessary and further increase the complexity of the system.
PIA provides nearly constant low losses independent of the linearity of the force/displacement characteristics. This means that significantly smaller actuators can be installed and thermal problems can be avoided right from the start.
In addition, the low losses ensures better usability in battery-powered mobile systems. This opens up new fields of application in robotics that are not yet economically feasible today.
2) The variable stiffness of the system:
Today, electric motor and pneumatic systems quickly reach their limits when it comes to the adjustability of stiffnesses or softnesses of systems. However, it is often necessary, especially in robotics and automation technology, to be able to adjust how “stiff” a system reacts during human-machine interaction or contact with objects in order to protect both the system and the human or manipulated object from each other and prevent damage or injury.
This property plays a key role in the acceptance of autonomous systems – the user must be able to rely on not being hurt by the system, and the system must be able to survive its environment, and unforeseen situations, without damage.
Today, our naXture technology based on solid-state actuators already addresses all of the aforementioned focal points.
So this is by no means a dream of the future, but is already available to you today for integration into high-performance applications.
Talk to us and we will be happy to advise you.
We would also like to advise you on the future implementation of our PIA technology for highly cost-sensitive and high-volume series production.
Got your interest ?
Then why not also take a look here
- MetisMotion presents “Ultimate design flexibility for YOU!” with naXture @ automatica 2023

- MetisMotion – Join our SUCCESS STORY

- News from Product Management: Design of a two-stage naXture actuator using the example of a puncher

- MetisMotion introduces naXture Guide – the world’s first actuator with the sixth sense @ automatica 2022

- MetisMotion @ automatica 2022 || naXture Guide Launch

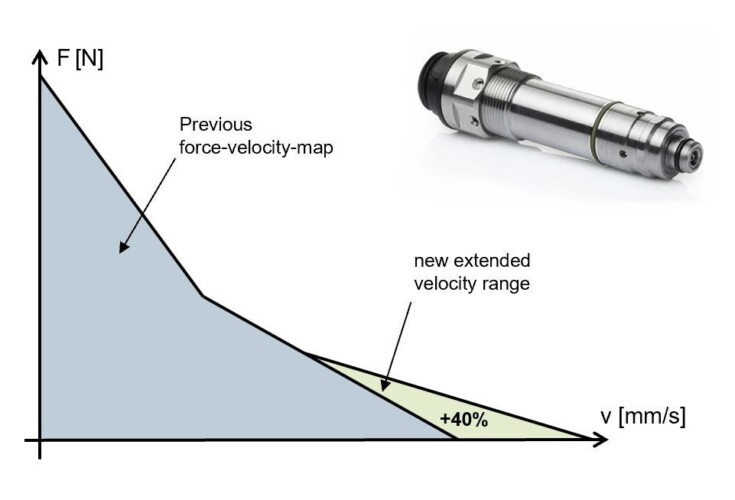
- News from Product Management: naXture in the fast lane
- Outlook R&D – Grant project PIA

- News from the product management: Selecting a naXture actuator for your actuation task – Unlatching
- MetisMotion presents naXture
